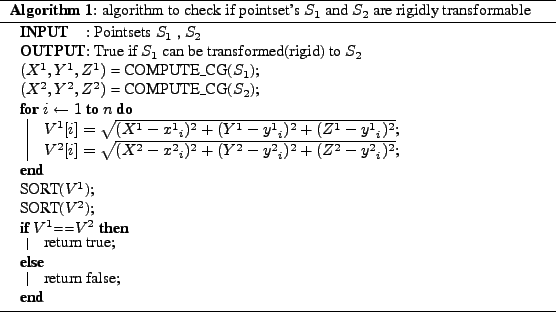
Proof.
The proof is based on a very simple fact that relative position(from any of the points in the point set) of the
Center of Gravity of a set of 3-D points remains unchanged when these
3-D points are transformed by any rigid transformation. The Center of Gravity(CG) for a 3-D point sets is defined as follows.
If the relative position of the CG with respect any of the points in the
point set changes due to transformation then the transformation is not
a rigid transformation. So we use this fact and compute the euclidean
distance from
to each of the

points in the
point set call this distance

.
once we compute
we sort these distances and create a
distance vector

for point set

similarly we create
a vector

for

. And finally compare if
and
are the same if they are same its possible to find
a rigid transformation from
to
, once we know that its possible to find a rigid transformation its trivial to find out

(rotational) and

(translational).